

2023-07-12
2. ABB Robot Güç Modülü Kısa Devre Kartının Kısa Devre Arızasının Ele Alınması
İnsan faktörleri: Çalışırken değiştirilebilen donanım çok tehlikelidir ve birçok devre kartı arızasına çalışırken değiştirilerek neden olunur.Güç bulunan kartları ve fişleri takarken yanlış güç kullanımı arabirimlere, yongalara vb. zarar vererek robot devre kartının hasar görmesine neden olabilir;Robot kullanma süresi arttıkça, robot devre kartı üzerindeki bileşenler doğal olarak eskiyecek ve robot devre kartı arızalarına yol açacaktır.
Çevresel faktörler: Operatörün uygunsuz bakımı nedeniyle, robot devre kartı sinyal kısa devrelerine neden olabilen tozla kaplıdır.
3. Endüstriyel robotları yedeklemek ne zaman gereklidir?
Yeni makinenin ilk kez çalıştırılmasından sonra.
Herhangi bir değişiklik yapmadan önce.
3. Değişiklikleri tamamladıktan sonra.
4. Endüstriyel robotlar önemliyse haftada bir ve düzenli olarak yapılmalıdır.
5. USB sürücüsünde de bir yedekleme yapmak en iyisidir.
6. Sabit diskte yer açmak için eski yedekleri düzenli olarak silin.
4. Robotun açık olduğu ve asılı öğretim ekranının aşağıdaki arayüzü göstermeye devam ettiği durumla nasıl başa çıkılacağı
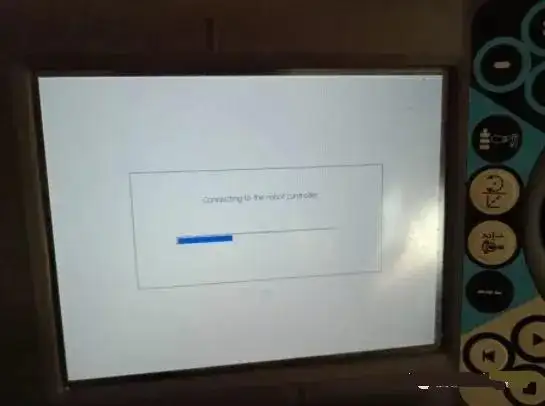 Yukarıdaki durum, öğretim asılı sistemi ile robotun ana denetleyicisi arasında kurulan bir iletişim bağlantısının olmaması ve bağlantının kurulmamasının nedenleri arasında şunlar yer alır:
Yukarıdaki durum, öğretim asılı sistemi ile robotun ana denetleyicisi arasında kurulan bir iletişim bağlantısının olmaması ve bağlantının kurulmamasının nedenleri arasında şunlar yer alır:
1. Robot ana bilgisayarı arızalı.
2. Robot ana bilgisayarının yerleşik CF kartı (SD kartı) arızalı.
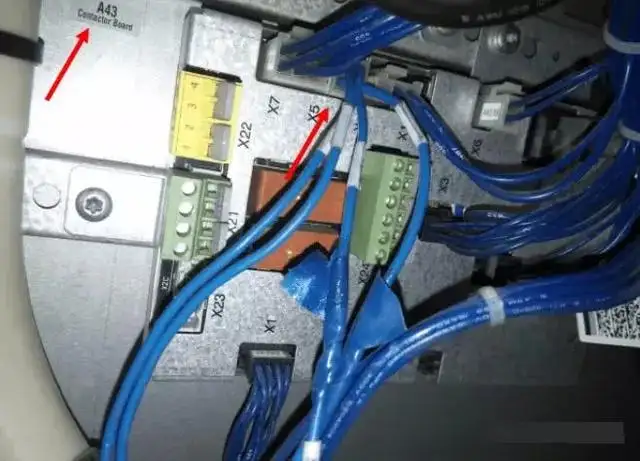
3. Asılı öğretim ünitesi ile ana bilgisayar arasındaki ağ kablosu gevşek, vb.
İşleme yöntemi: 1. Ana bilgisayarın normal olup olmadığını ve ana bilgisayardaki SD kartın normal olup olmadığını kontrol edin.
2. Asılı öğretim ünitesinden ana bilgisayara giden ağ kablosunun düzgün şekilde bağlanıp bağlanmadığını kontrol edin.
5. Robot bir alarm mesajı gösterdiğinde 10106 bakım zamanı hatırlatıcısının anlamı nedir?
Bu durum bir ABB robotu akıllı periyodik bakım hatırlatıcısıdır.
6. Robot güç açık durumuna girdiğinde bir sistem arızasıyla nasıl başa çıkılır?
1. Robotu bir kez yeniden başlatın.
Değilse, daha ayrıntılı alarm istemleri için öğretim pandantifini kontrol edin ve harekete geçin.
3. Yeniden başlatın.
4. Hala serbest bırakılamıyorsa, B başlatmayı deneyin.
5. Hala çalışmıyorsa, lütfen P başlatmayı deneyin.
6. Hala çalışmıyorsa, lütfen başlatmayı deneyin (bu, robotu fabrika ayarlarına döndürür, dikkatli olun).
7. Robot yedeklemesi birden fazla robot tarafından paylaşılabilir mi?
Hayır. Örneğin, robot A'nın yedeği yalnızca robot A için kullanılabilir, robot B veya C için kullanılamaz, çünkü bu sistem arızalarına neden olabilir.
8. Robot yedeklemede hangi dosyalar paylaşılabilir?
İki robot aynı model ve konfigürasyona sahipse.RAPID programını ve EIO dosyasını paylaşabilirsiniz, ancak paylaşımdan sonra normal şekilde kullanılabilmesi için ayrıca doğrulanması gerekir.
9. Robotların mekanik kökeni nedir?Mekanik köken nerede?
Robotun altı servo motorunun her biri benzersiz bir sabit mekanik orijine sahiptir.Robotun mekanik orijinin yanlış ayarlanması, robotun sınırlı veya yanlış hareket etmesi, düz bir çizgide yürüyememesi ve robotun ciddi şekilde zarar görmesi gibi sorunlara yol açacaktır.
10. Robot 50204'ün eylem izleme alarmı nasıl temizlenir?
1. Robot eylemi izleme parametrelerini (kontrol paneli eylem izleme menüsünde) gerçek duruma uyacak şekilde değiştirin.
2. Robotun ivmesini azaltmak için AccSet komutunu kullanın.
3. Hız verilerinde v'yi azaltın_ Rot seçeneği.
11. Robot ilk kez çalıştırıldığında "50296, SMB bellek veri farkı" alarmı nasıl ele alınır?
1. ABB ana menüsünden Kalibrasyon'u seçin.
2. ROB_ 1'e tıklayın. Kalibrasyon ekranına girin ve SMB belleğini seçin.
3. "Gelişmiş"i seçin, girin ve "Kontrol Kabini Belleğini Temizle"ye tıklayın.
4. Tamamladıktan sonra "Kapat"a ve ardından "Güncelle"ye tıklayın.
5. 'Kontrol kabini veya robot kolu değiştirildi, kontrol kabini SMB bellek verileriyle güncelleniyor' öğesini seçin.
12. RAPID programında robot yörünge hareketinin hızı nasıl özelleştirilir?
1. Öğretim pandantifinin ana menüsünden Program Verileri'ni seçin.
2. Speeddata veri türünü bulduktan sonra Yeni'ye tıklayın.
3. İlk değere tıklayın ve dört değişken Speeddata'nın anlamları şunlardır: v_ TCP, robotun doğrusal çalışma hızını temsil eder, v_ Rot, robotun dönme hızını temsil eder, v_ Leax, dış eksenin doğrusal çalışma hızını temsil eder , v_ Reax, dış eksenin dönüş hızını temsil eder.Dış eksen yoksa, son ikisinin değiştirilmesine gerek yoktur.
4. Kişiselleştirilmiş veriler, RAPID programında çağrılabilir.
13. ABB Robot Servo Motor Onarımında Sık Karşılaşılan 6 Hatanın Giderilmesi
1. Yüksek hızlı dönüş sırasında motor hatası sayacı taşma hatası nasıl ele alınır?
Yüksek hızlı dönüş sırasında motor hatası sayacı taşma hatası oluşur.
Önlem 1: Motor güç kablosunun ve enkoder kablosunun kablolamasının doğru olup olmadığını ve kablonun hasarlı olup olmadığını kontrol edin.
Uzun bir komut darbesi girilirken motor hatası sayacı taşma hatası oluşur.
Çalışma sırasında motor hatası sayacı taşma hatası oluştu.
Önlem 2: Hata sayacının taşma seviyesi ayar değerini artırın;Dönme hızını yavaşlatın;Hızlanma ve yavaşlama süresini uzatın;Yük çok ağırdır ve sıfırdan daha büyük kapasiteli bir motor seçmek veya yükü azaltmak ve yükü artırmak için redüktör gibi transmisyon organizasyonları kurmak gerekir.
2. Pulse çıkışı varken çalışmıyorsa ne yapılmalı?
Denetleyicinin darbe çıkışının mevcut değerini ve darbe çıkış ışığının yanıp söndüğünü denetleyin, komut darbesinin yerine getirildiğini ve artık normal çıktı verdiğini kabul edin;
Denetleyiciden sürücüye giden denetim kablosunun, güç kablosunun ve kodlayıcı kablosunun kablolarının yanlış, hasarlı veya zayıf temas halinde olup olmadığını kontrol edin;
Frenli servo motorun freninin şimdi açılıp açılmadığını kontrol edin;
Servo sürücü panelinin darbe komutlarının girişini onaylayıp onaylamadığını denetleyin;
Çalıştırma komutu normaldir;
Kontrol formu yön kontrol formunu seçmelidir;
Servo sürücü tarafından ayarlanan giriş darbe tipi, komut darbe ayarıyla tutarlı mı;
Pozitif dönüş tarafındaki sürücünün durdurulduğundan, dönüş tarafındaki sürücü durdurma sinyalinin ve hata sayacı sıfırlama sinyalinin girilmediğinden, yükün bağlantısının kesildiğinden ve yüksüz çalışmanın normal olduğundan emin olun.Mekanik sistemi kontrol edin.
3. Yük ile aşırı yük raporu yoksa ne yapmalıyım?
Servo Çalıştırma sinyali bağlandığında ve hiçbir darbe yayılmadığında meydana gelirse:
Zayıf temas veya kablo hasarı olup olmadığını görmek için servo motorun güç kablosu kablolarını kontrol edin;Frenli bir servo motor ise, fren açılmalıdır;Hız döngüsünün kazancı çok mu yüksek ayarlanmış;Hız döngüsünün integral zaman sabiti çok küçük ayarlanmış mı?
Servo yalnızca çalışma sırasında arızalanırsa:
Azimut devresinin kazancı çok mu yüksek ayarlanmış;Konumlandırma tamamlama genliği çok mu küçük ayarlanmış;Servo motor milinde kilitli rotor olup olmadığını kontrol edin ve makineyi sıfırdan ayarlayın.
4. Çalışma sırasında anormal sesler veya titreşimlerle nasıl başa çıkılır?
Servo kablolama:
Hasar olup olmadığını kontrol etmek için standartlaştırılmış güç kabloları, kodlayıcı kabloları, kontrol kabloları ve kabloları kullanın;Kontrol hattının yakınında parazit kaynakları olup olmadığını ve bunların yakındaki yüksek akım güç kablolarına paralel veya çok yakın olup olmadığını kontrol edin;Mükemmel topraklama sağlamak için topraklama terminalinin potansiyelinde herhangi bir değişiklik olup olmadığını kontrol edin.
servo parametreleri:
Servo kazanç ayarı çok büyük ve servo parametrelerini manuel olarak veya aktif olarak sıfırdan ayarlamanız önerilir;Hız tepkisi filtresinin zaman sabiti ayarını 0 başlangıç değeriyle kabul ederek, ayarlanan değeri test ederek artırmak mümkündür;Elektronik dişli oranı ayarı çok büyük, fabrika ayarlarına geri dönmeyi savunuyor;Servo sistem ile mekanik sistem arasındaki rezonans, çentik filtre frekansı ve genliğinin test edilmesi ve ayarlanması.
Mekanik sistem:
Motor milini ve ekipman sistemini bağlayan kaplin sapmış ve montaj vidaları sıkılmamış;Kasnakların veya dişlilerin zayıf şekilde bağlanması da yük torkunda değişikliklere yol açabilir.Yüksüz çalışmayı test edin.Yüksüz çalışma normal ise, mekanik sistemin bağlantı kısmında herhangi bir anormallik olup olmadığını kontrol edin;Yük ataleti, tork ve hızın çok büyük olup olmadığını kabul edin, yüksüz çalışmayı test edin ve yüksüz çalışma normalse yükü azaltın veya sürücü ve motoru daha büyük bir kapasiteyle değiştirin.
5. ABB robot servo motor onarımı sırasında yanlış yönlendirme kontrolü ve konumlandırma nasıl ele alınır?
İlk olarak, kontrolörün beyan edilen gerçek darbe değerinin beklenen değerle tutarlı olup olmadığını onaylayın ve değilse, programı kontrol edin ve düzeltin;
Servo sürücü tarafından alınan darbe komutlarının sayısının kontrolör tarafından açıklananla eşleşip eşleşmediğini denetleyin.Değilse, kontrol kablosunu kontrol edin;Servo komut darbe biçimi ayarının, CW/CCW veya darbe+yön gibi denetleyici ayarıyla tutarlı olup olmadığını kontrol edin;
Servo kazanç ayarı çok büyük, lütfen servo kazancını manuel olarak veya aktif olarak sıfırdan ayarlayın;Servo motor, ileri geri hareket sırasında birikmiş hatalara eğilimlidir.Prosesin izin verdiği koşullar altında mekanik bir orijin sinyalinin ayarlanması ve hata izin verilen ölçeği aşmadan önce orijin arama işleminin gerçekleştirilmesi önerilir;Mekanik sistemin kendisi düşük doğruluğa veya anormal iletim organizasyonuna sahiptir (servo motor ile ekipman sistemi arasındaki bağlantının sapması gibi).
6. ABB robot servo motor onarımı, yön kontrol işlemi, aşırı hız hatası bildirildi.Nasıl halledilir?
Servo Çalıştırma sinyali bağlanır bağlanmaz tetiklenecektir: servo motor güç kablosu ve enkoder kablosunun kablolamasının doğru ve hasarsız olup olmadığını kontrol edin.
14. ABB endüstriyel robotları rutin bakımdan nasıl geçiyor?
"Fren denetimi"nin normal çalışmasından önce, her eksenin motor freninin kontrol edilmesi gerekir.Motor freni için muayene yöntemi aşağıdaki gibidir:
1. Her bir robotik kolun eksenini maksimum yük konumuna getirin.
2. Robot kontrol ünitesindeki motor modu seçim anahtarını MOTORS OFF konumuna getirin.
3. Milin orijinal konumunda olup olmadığını kontrol edin.Motor durdurulduktan sonra mekanik kol hala pozisyonunu koruyorsa frenin iyi durumda olduğunu gösterir.
Yavaşlama işlemi (250 mm/sn) işlevini kaybetme tehlikesi
Dişli oranını veya diğer hareket parametrelerini bilgisayardan veya öğretim pandantifinden değiştirmeyin.Bu, yavaşlama işlemi (250 mm/sn) işlevini etkileyecektir.
15. Öğretim araçlarını güvenli bir şekilde kullanırken dikkat edilmesi gereken birkaç nokta:
Öğretim pandantifine takılı etkinleştirme cihazı düğmesi, yarıya kadar basıldığında, sistemi MOTORLAR AÇIK moduna değiştirir.Düğme bırakıldığında veya tam olarak basıldığında, sistem MOTORS OFF moduna geçer.
16. Öğretim araçlarını güvenli bir şekilde kullanmak için aşağıdaki ilkelere uyulmalıdır:
1.Etkinleştirme cihazı düğmesi, programlama veya hata ayıklama sırasında işlevini kaybedemezse ve robotun hareket etmesi gerekmiyorsa, cihazı etkinleştirme düğmesini hemen bırakın.
2. Programlama personeli güvenli bir alana girdiğinde, başkalarının robotu hareket ettirmesini önlemek için öğretme askısını her zaman vücutlarında taşımalıdır.
17. Robotik kolun çalışma alanı içinde çalışırken aşağıdaki noktalara dikkat edilmelidir:
1. Bilgisayarın bağlantısını kesmeye veya uzaktan çalıştırmaya olanak sağlayan aygıtı çalıştırmak için denetleyicideki mod seçme anahtarı manuel konuma getirilmelidir;
2. Mod seçme anahtarı açıkken
3. Robotik kolun dönüş eksenine dikkat edin, saç veya kıyafet karıştığında dikkatli olun.Ayrıca, robot kolunda seçilen diğer bileşenlere veya ekipmanlara dikkat edin;
4. Her eksenin motor frenini kontrol edin.
18. Dokunma sapması
Olgu 1: Parmakların dokunduğu konum fare okuyla çakışmıyor.
Sebep: Sürücü programını kurduktan sonra, öğretim pandantifi kalibrasyon sırasında hedef noktasının merkezine dikey olarak değmedi.
Çözüm: Konumu yeniden kalibre edin.
Olgu 2: Bazı alanlarda hassas temas varken, diğerlerinde temasta sapma var.
Neden: Yüzey akustik dalga dokunmatik ekranının etrafındaki akustik yansıma şeritlerinde akustik sinyallerin iletimini etkileyen büyük miktarda toz veya tortu birikmektedir.
Çözüm: Dokunmatik ekranın her tarafındaki ses dalgası yansıma şeritlerini temizlemeye özellikle dikkat ederek dokunmatik ekranı temizleyin.Temizlerken, dokunmatik ekranlı kontrol kartının güç kaynağı bağlantısını kesin.
19. Öğretim pandantifi dokunmaya yanıt vermiyor
Olgu: Ekrana dokunulduğunda fare okları hareket etmiyor ve konumlarında herhangi bir değişiklik olmuyor.
Sebep: Bu fenomenin aşağıdaki gibi birçok nedeni vardır:
1. Yüzey akustik dalga dokunmatik ekranının etrafındaki akustik yansıma şeritlerinde biriken toz veya kireç çok ciddidir ve dokunmatik ekranın çalışmamasına neden olur;
2. Dokunmatik ekran arızası;
3. Dokunmatik ekran kontrol kartı arızalı;
4. Dokunmatik ekran sinyal hattı arızalı;
5. Ana bilgisayarın seri bağlantı noktası arızaları;
6. El kumandalı öğretim sisteminin işletim sistemi arızalanmıştır;
7. Dokunmatik ekran sürücüsü kurulum hatası.
Çözüm: Normal koşullarda yaklaşık olarak saniyede bir kez düzenli olarak yanıp sönen dokunmatik ekran sinyal gösterge ışığına bakın.
Ekrana dokunulduğunda, öğretim pandantifi kararıyor ve bu karmaşık bir sorun.Arka ışık enerji tasarrufu ayarlanmışsa, siyah ekran normaldir;Sistem kontrol alanındaki ikinci kelime yanlışlıkla çalıştırılırsa ekran da kararacaktır.İlk iki nokta hariç tutulursa, inceleme için en son ürün yazılımına güncelleyin.
Sorgunuzu doğrudan bize gönderin

